Forum Migration Notice
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
TCP doesn't got to robtarget, IRC5P Upgrade....

Neily03
✭✭✭
Hi,
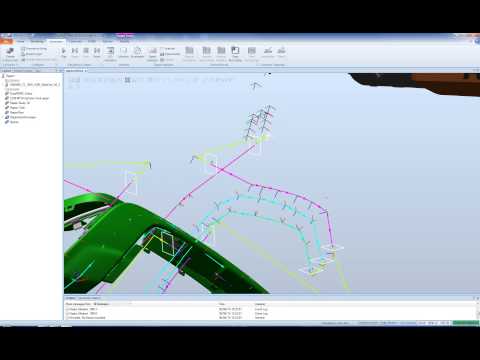
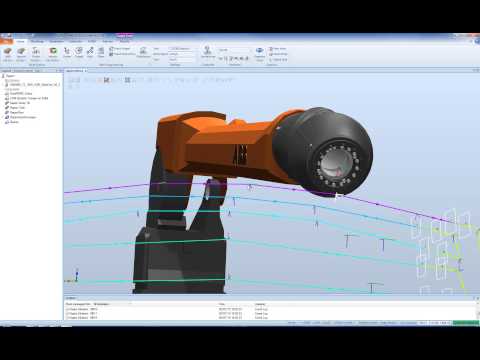
Last week we had our S4P controller upgraded to IRC5P, keeping the IRB5400 manipulator, today I've built a new RS station using the correct robotware and the restored a backup into it. The problem i'm having is that the TCP seems to be offset from the all the robtargets and i can't see why this would be. Please see attached video clip.
 http://youtu.be/UU4bP2guFWM
http://youtu.be/UU4bP2guFWM
http://youtu.be/UU4bP2guFWM
Post edited by Neily03 on
0
Comments
-
A lot of things could be wrong, but first if you are just "jumping to the target", then check if you have selected the right tool. It looks like you have a more than one tool data in you station0
-
Yes I'm selecting the correct tool, I've tried various ones with the same result, even with tool0 there's the same offset.
Even when running the simulation the situation is the same.0 -
hmm if you selected tool0 and don't get a different result, then something definitely wrong How do you make the robot move? with the simulation button, go to target, execute instruction function or something else?0
-
I run the simulation from the simulation window and the Play button....0
-
And there is no changes if you use tool0 instead of you normal tool in the Rapid code?0
-
In the video It looks like you move the robot by selecting the targets. You could check if the correct tool is selected under the Home tab -> settings -> tool (see image)0
-
The situation is the same, the TCP never lines up with the robtarget, all my other stations work fine.
 http://youtu.be/KHKcSmGIutM
Could it be anything to do with this being a controller upgrade with an old (2001 IRB5400) robot? Although the IRB5400 is still a current model... 0
http://youtu.be/KHKcSmGIutM
Could it be anything to do with this being a controller upgrade with an old (2001 IRB5400) robot? Although the IRB5400 is still a current model... 0 -
Hmm don't know about the upgrade, but maybe if you can send a pack&go I can try to look at it.0
-
-
I have looked at the station and the problem is that the robot is of type IRB 5400-02 which is not available in RobotStudio 5/6 as it has never been sold as new with IRC5P. The model you have used as a replacement is IRB 5400 - 12 which is different. Anyway, I have converted the correct model from RobotStudio 4, see attachment. Open Edit System and replace the library and it will work.Henrik Berlin
ABB1 -
I had a feeling the problem was because the robot was wrong. Thank you Henrik it's now working perfectly. Neil.0


Categories
- All Categories
- 5.7K RobotStudio
- 401 UpFeed
- 21 Tutorials
- 16 RobotApps
- 306 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 366 IRC5
- 90 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 857 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings