Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Does anyone help me find this error with Smart Component in RobotStudio?

Hello boys,
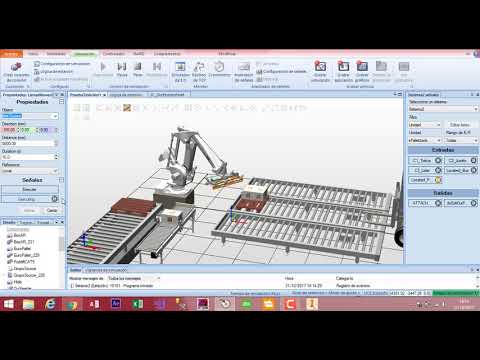
I'm creating a palletizing station. I have a problem with the exit of the pallet once complete.
The SmartComponent "SC_OutFedderPallet" is configured and works, but I must activate and deactivate the output destined to activate the "LinearMover2" beforehand, so that it does it once it reaches the configured point for the Pallet output, which generates a group of additional components that is not used at all. Therefore, if I delete the connection between "LinearMover2" and "Source", so that it does not create that new group, it does NOT perform the movement through the Outfeeder, emitting the signal for the execution, but does not move the objects.
Any idea how to solve that?
In the video I try to show what I tell them. I also try to show logic and connections ...
If you need any additional information that you can provide, do not hesitate to respond or write by private message.
 https://youtu.be/FATBEzhbdWw
https://youtu.be/FATBEzhbdWw0
Comments
-
Can you provide a Pack and Go file?
/Adnan
0 -
Hello Adnan!Do you require it for personal use or to try to help me? I can leave the download link via Drive by private message.Best regards!0

Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings