Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Stand Alone Controller - Error 50050 - base frame

in RobotStudio
Hello,
I am currently trying to implement an self build Robot in Robot Studio with the Stand Alone Controller (SAC).
It works so far well, I can move the axes individually and the Stand Alone Controller is connected to the robot.
Unfortunately, the robot arm moves only when approaching the jointtarget positions, when i approaching robtarget the Error 50050 appera.
Upper and Lower Joint Bound are chosen big enought. I can reach the Position by Manual moving the axis and teach them.
Detailed Problem description:
- When i teach the exact same Robot position over the FlexPedant I get the Result in the Picture above -> Target_home_in_FlexPedant.
- But, if i use the "Robot-Studio"-User Interface teach option, i get a different Result on Target -> Target_home_in_RS

The Robot is able to move to the "Target_home_in_FlexPedant" Position but not to the "Target_home_in_RS" Position.
Are there two base Frames ? Why they don´t match ? is there any Possible Option to Change the scaling of the base frame?
I hope anyone can help, or has an idea...
I would be very happy about any considerations or thoughts")
Many thanks in advance
Sebastian
Background Information:
I used this Mechanical Unit Model for SAC:
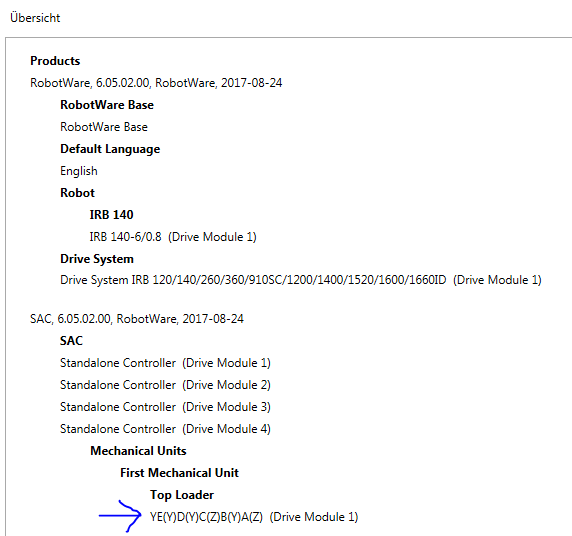
Picture of Robot-Model:

I am currently trying to implement an self build Robot in Robot Studio with the Stand Alone Controller (SAC).
It works so far well, I can move the axes individually and the Stand Alone Controller is connected to the robot.
Unfortunately, the robot arm moves only when approaching the jointtarget positions, when i approaching robtarget the Error 50050 appera.
Upper and Lower Joint Bound are chosen big enought. I can reach the Position by Manual moving the axis and teach them.
Detailed Problem description:
- When i teach the exact same Robot position over the FlexPedant I get the Result in the Picture above -> Target_home_in_FlexPedant.
- But, if i use the "Robot-Studio"-User Interface teach option, i get a different Result on Target -> Target_home_in_RS
The Robot is able to move to the "Target_home_in_FlexPedant" Position but not to the "Target_home_in_RS" Position.
Are there two base Frames ? Why they don´t match ? is there any Possible Option to Change the scaling of the base frame?
I hope anyone can help, or has an idea...
I would be very happy about any considerations or thoughts
Many thanks in advance
Sebastian
Background Information:
I used this Mechanical Unit Model for SAC:
Picture of Robot-Model:
0
Comments
-
How are you trying to move the robot to the robtarget? MoveL or MoveJ? That 50050 error is just a "position outside reach" if I remember correctly, and should include an argument for which joint it is.
Are you working with a Real Controller and a Virtual Controller or just a VC connected to a station? I'm sorry, it wasn't quite clear for me. And forgive me if my answer is a bit simplistic to start but are you sure that your work objects and the way they were taught aren't the cause? You can teach the same point using different workobjects and get different cartesian data like below. This is the same point, one is my Wobj0 and one is my project Wobj. The JOINT angles will be the same, but the Cartesian data will not be. If you're mismatching your workobjects you'll get these errors a lot.CONST robtarget Target_20:=[[-341.694961914,444.540725636,1129.711995023],[0.121829992,-0.697464029,0.695858072,0.120345028],[0,-1,0,0],[0.00217171,9E+09,9E+09,9E+09,9E+09,9E+09]];CONST robtarget Target_40:=[[759.045725636,-2093.171961914,1681.069004977],[0.001135583,0.171243598,0.001050028,0.985227506],[0,-1,0,0],[0.00217171,9E+09,9E+09,9E+09,9E+09,9E+09]];PROC Path_10()MoveL Target_20,v1000,z100,tool0\WObj:=wobj0;MoveL Target_40,v1000,z100,tool0\WObj:=wobj737FlapTrack1;ENDPROC
-Brian0 -
Hello Brian,
sorry that i don't answered earlier,... but i lost the hope that someone will face my problem,.. THANK YOU
1) I am moving the Robot with MoveJ and yes the Error 50050 means "position outside reach"
2) I just used the Virtual Controller
The Programm stops at the second MoveJ with Error 50050 - I am using the wobj0 wich is located at the bottom center of the Robot.
i think i have no second workobject like in the Code you have Posted (wobj737FlapTrack1) - If there is one,... doesn't it has to appear on the list on my last picture?


Thank you for you Help
Sebastian
0

Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings