Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
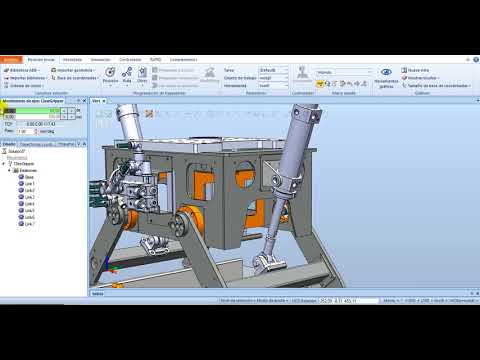
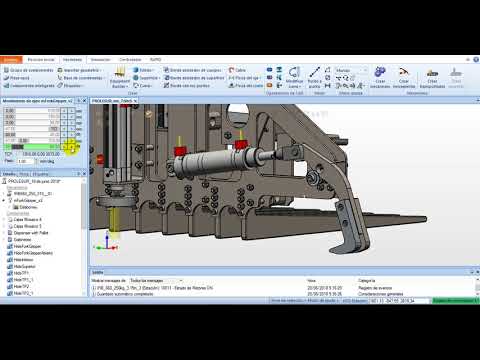
How do I achieve these movements in the creation of a new mechanism?

Does anyone know how to achieve these "real" movements between the cylinder and the rod for the creation of a new mechanism? I try to replicate them, but I can not do it. I think there are steps that I do not know yet ... Any help? Thank you...
I attach videos for reference. The first is the ClawGripper that comes by default in the program, the second, the tool that I am developing.
 https://www.youtube.com/watch?v=p-Uk3XoDmtY
https://www.youtube.com/watch?v=p-Uk3XoDmtY
 https://www.youtube.com/watch?v=Y9FoKiHDOKQ
https://www.youtube.com/watch?v=Y9FoKiHDOKQ
https://www.youtube.com/watch?v=p-Uk3XoDmtYhttps://www.youtube.com/watch?v=Y9FoKiHDOKQ0
Answers
-
For creating mechanism there few basics steps that is to be followed
1.geometery should be defined as tool
2. Fixed component
3. moving component
4.Linking of each component
5.Joint creation with respect to links
6. tool define
7. compile mechanism
8. then different position should be added and also give name to those position
9. define digital signals
10. creation of events in event manager
After that gipper will work on given signal or as per programed
0 -
Thanks for your estimated response. The problem he was having was in relation to the dependencies of the mechanism. I had to add them by formula, since physically it is not possible because of the types of axes. Do you handle a bit on that subject? I still have some doubts ...0

Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings