
Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
How to create a mechanism for the Standalone Controller and XYZ Gantry in RobotStudio

Maxim Riabichev
admin
Hello all,
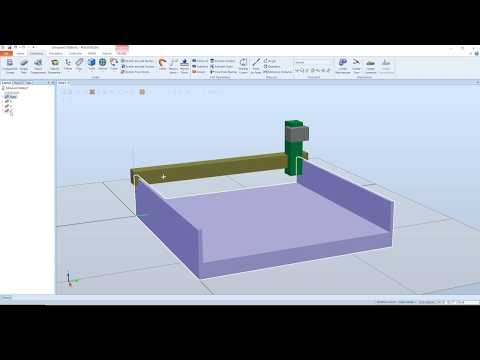
I've created a video with instructions on how to create a mechanism for the Standalone Controller and XYZ Gantry.
 https://youtu.be/ju6vYbPDK2o
https://youtu.be/ju6vYbPDK2o
Big thanks to @Anders S for showing me how to do this properly!
I've created a video with instructions on how to create a mechanism for the Standalone Controller and XYZ Gantry.
https://youtu.be/ju6vYbPDK2oBig thanks to @Anders S for showing me how to do this properly!
—
Maxim Riabichev
PC Software Support Engineer
1
Comments
-
Nice concise video with all the required steps. Made a few things clear to me with respect to setting up a SAC. Many thanks.0
-
Next one could have 5 axis with rotation etc. That would be really useful.0
-
Hi, thanks for the video, very instructive. I was able to configure the standalone controller and jog the gantry robot. The problem is that the software does not change the axis limits. I input different values and re-start the controller but keep using the default 1 meter/ 1 radian range. I am using RobotStudio 2021.1.2 (64-bit)0
-
To change the default joint bound max/min values, you have to change them directly in the MOC.cfg.
Go to Controller tab, expand Configuration, right-click Motion, select Save Parameters.
Open MOC.cfg in Notepad++ or equivalent, find the section called ARM: and look for the
"-upper_joint_bound_max 1 -lower_joint_bound_min 0" for the relevant axis.
When done editing the file, save it, then back into RS, right-click Configuration of the Controller, select Load Parameters and load the MOC.cfg that you just edited.
Post edited by Maxim Riabichev on—Maxim RiabichevPC Software Support Engineer1 -
Hi, nice video. Is it possible to use safemove to monitor axes speeds or safe ranges for axes on gantry solutions?0
-
# Quote from Application manual, SafeMove 2.Non ABB track motion units, non ABB positioners, and other additional axis may be supported by the SafeMove option but this needs to be verified case by case. To verify if a non ABB additional axis can be used with SafeMove, tune the additional axis before configuring the SafeMove parameters. If a properly tuned and configured non ABB additional axis still generates error messages regarding servo lag, thenit cannot be used with SafeMove.0
-
Dont forget a warmstart to see changes reflected in station.Maxim Riabichev said:To change the default joint bound max/min values, you have to change them directly in the MOC.cfg.
Go to Controller tab, expand Configuration, right-click Motion, select Save Parameters.
Open MOC.cfg in Notepad++ or equivalent, find the section called ARM: and look for the
"-upper_joint_bound_max 1 -lower_joint_bound_min 0" for the relevant axis.
When done editing the file, save it, then back into RS, right-click Configuration of the Controller, select Load Parameters and load the MOC.cfg that you just edited.0 -
@Maxim Riabichev or anyone else, is it possible to change the frames orientation and calibration orientation through the MOC file after mechanism compilation ? If yes, is it the "attitude" and "theta_home" parameters ?
For example, after realizing that a mistake was made and in order to avoid rebuilding the mechanism from start0







Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings