Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Aligning rslib tool to robot

xerim
✭
in RobotStudio
Hello all,
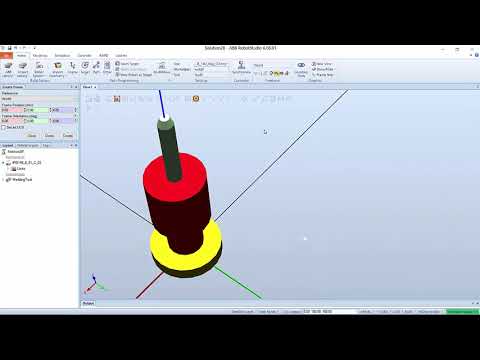
I've been trying to import my rslib tool and attach it to the robot with no success so far. The issue I'm having is no matter which reference I use as a coordinate system (World, Local, UCS) the origin of the tool is always at a skew, making it nearly impossible to orient it to the machine. If I select parts of the tool individually, it gives me an origin for each part that is aligned in a way that I would expect. See attached photos below:
What I expect to happen when I select the entire tool:

What actually happens:

Am I missing something here? I cannot for the life of me figure out why Robot Studio would place the origin for the entire tool at what seems like such an arbitrary location. Thanks in advance.
I've been trying to import my rslib tool and attach it to the robot with no success so far. The issue I'm having is no matter which reference I use as a coordinate system (World, Local, UCS) the origin of the tool is always at a skew, making it nearly impossible to orient it to the machine. If I select parts of the tool individually, it gives me an origin for each part that is aligned in a way that I would expect. See attached photos below:
What I expect to happen when I select the entire tool:
What actually happens:
Am I missing something here? I cannot for the life of me figure out why Robot Studio would place the origin for the entire tool at what seems like such an arbitrary location. Thanks in advance.
0
Comments
-
Did you drag and drop the tool on your Robot? It seems that your Base Frame of the Tool is not set correctly.
Is your TCP in the correct position?0 -
jmf said:Did you drag and drop the tool on your Robot? It seems that your Base Frame of the Tool is not set correctly.
Is your TCP in the correct position?
No, when I do that it asks if I would like to update the position, answering yes throws the tool way out of alignment and answering no just keeps it in the same position but it moves with the machine. I have not defined the TCP yet as I am just trying to get it oriented to the machine first.0 -
It seems that the local base frame of the tool is not in the correct place. Did you create the Tool model yourself? If you did make the tool yourself, try to set the local origin to 0 before using the tool wizard to create the tool.0
-
I am rebuilding a station that was previously created by someone else. I imported the tool from the solution library as I noticed they had these kept these files in the directory. Should I be using the tool wizard instead?jmf said:It seems that the local base frame of the tool is not in the correct place. Did you create the Tool model yourself? If you did make the tool yourself, try to set the local origin to 0 before using the tool wizard to create the tool.0 -
Watch this video. He explains it well. The tool should be referenced to the Base Frame of the station.
 https://www.youtube.com/watch?v=JOfzHlKB-0I
https://www.youtube.com/watch?v=JOfzHlKB-0I
Watch the video, then export the tool as a .ACIS file. Import the tool as a geometry model and place it as the guy explains in the video. You should be able to get this working with this video.
1 -
Was finally able to correct this by right clicking my entire tool assembly > modify > set local origin. Once my origin was in the correct place I was able to position it with no issues.0

Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings