Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
ProfiSafe F-Parameters in I/O Configurator

jrfall
✭
in RobotStudio
Hello,
I've been trying to get some SDIO going with an IRC5, and a Siemens S7-1200.
I can get the two devices communicating with DIO, and I can see the state of my SDI signal from the PLC change, when i would expect it to.
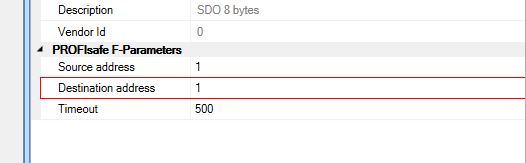
However, the destination addresses for both SDO and SDI keep resetting to 1. I will change them, and write config, and then they come right back as 1.

On top of this, when I set up my SDI as the trigger for a stop condition in SafeMove, it doesn't actually stop- nor do I see the shield indicating the signal is used in SafeMove, as I do on another robot here. I cannot see a difference between the two controllers.
Any help would be appreciated.
I've been trying to get some SDIO going with an IRC5, and a Siemens S7-1200.
I can get the two devices communicating with DIO, and I can see the state of my SDI signal from the PLC change, when i would expect it to.
However, the destination addresses for both SDO and SDI keep resetting to 1. I will change them, and write config, and then they come right back as 1.
On top of this, when I set up my SDI as the trigger for a stop condition in SafeMove, it doesn't actually stop- nor do I see the shield indicating the signal is used in SafeMove, as I do on another robot here. I cannot see a difference between the two controllers.
Any help would be appreciated.
0
Answers
-
hello, did you manage to sort this out ? I actually have a similar issue to this. not the same one, the destination address and all else stays ok. I have issue with the signal at Violation action. It does not change state when I go through my zone.0
-
I have not been able to resolve this yet.
0

Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings