Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
EGM Setup for C++ with Microsoft Visual Studio 2022

Robo_Kai
✭
in RobotStudio
Hi all,
I'm trying to set up Externally Guided Motion (EGM) for a CRB 15000 GoFa Arm and an Omnicore Controller and I want to use C++ in VS 2022 for that. I find the ABB instructions and resources quite insufficient, and unfortunately most tutorials on installing Google Protobuf are at least two years old and a lot seems to have changed in the installation process since then. That's why it took me quite some time and Trial-and-Error to install Protobuf.
Now I want to run the egm-sensor.cpp example as a Console Application and managed to remove most compiler errors (it was definitely not plug+play), but:
Here are the other Project Properties, which might have an impact on the problem, but changing them up didn't create a working solution for me...
I'm by no means a software engineer and am thankful for any advice I can get on the Setup of EGM! Thanks in advance. I know those are quite detailed questions but the process took me almost a week already and I am glad that I got this far by now.
(If there a detailed EGM C++ setup instructions somewhere hidden on the internet, I'm also happy for any advice.)
I'm trying to set up Externally Guided Motion (EGM) for a CRB 15000 GoFa Arm and an Omnicore Controller and I want to use C++ in VS 2022 for that. I find the ABB instructions and resources quite insufficient, and unfortunately most tutorials on installing Google Protobuf are at least two years old and a lot seems to have changed in the installation process since then. That's why it took me quite some time and Trial-and-Error to install Protobuf.
Now I want to run the egm-sensor.cpp example as a Console Application and managed to remove most compiler errors (it was definitely not plug+play), but:
- I can only Build the project when the result is a .lib file, which means I set the Configuration Type to Static library (.lib) (see image)
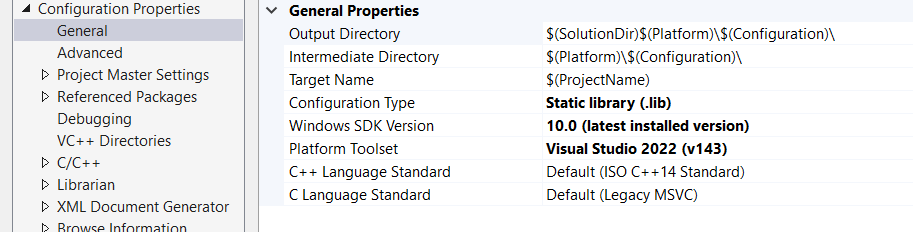

- For my understanding, I need some kind of executable file (presumably .exe) which is then executed together with the other program in RobotStudio, but when I use the Configuration Type "Application (.exe)" Visual Studio gives me 31 errors for "unresolved externals" from egm.pb.obj saying things like
egm.pb.obj : error LNK2001: unresolved external symbol "public: __cdecl absl::lts_20230125::log_internal::LogMessageFatal::~LogMessageFatal(void)" (??1LogMessageFatal@log_internal@lts_20230125@absl@@QEAA@XZ)
Here are the other Project Properties, which might have an impact on the problem, but changing them up didn't create a working solution for me...
Solution Configuration: Release (x64)
- Precompiled Header: Not Using Precompiled Headers
- Runtime Library: Multi-Threaded (/MT) (as this seems necessary for Release)
- All the additional libraries are linked and can be accessed (which was a previous problem I had)
- Do I need to Build the VS project in Release Mode? (I thought so because otherwise I'd have to use libprotobufd.lib instead of libprotobuf.lib in the egm-sensor.cpp example.)
- What type of output do I want/ expect from my Build in order to run EGM? .exe or .lib or something else?
- Is there an error in my VS Project Properties that prevents my Build from working?
- Did I forget something fundamental that my I wasn't aware of?
I'm by no means a software engineer and am thankful for any advice I can get on the Setup of EGM! Thanks in advance. I know those are quite detailed questions but the process took me almost a week already and I am glad that I got this far by now.
(If there a detailed EGM C++ setup instructions somewhere hidden on the internet, I'm also happy for any advice.)
0
Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings