Forum Migration Notice
We're transitioning to a more modern community platform by the end of this year. Learn about the upcoming changes and what to expect.
Creating move Function

hud_uitm
✭
in RobotStudio
Hi there, my name is Hud.
I?_Tm new in this Robotic field. I do some study about Robotic welding. One of my welding activity is welding on function path such as (y=sin ?, y=cos ? or y=x2+2x+4). Is anyone known about this? If so please do help me.
Thanks?_?..
0
Comments
-
I have not done this for welding, but for cutting pipe I have generated a path in autocad and then imported this into robotstudio and used create path from curve with reasonable success.In simplest forms you could generate the coordinates in excel with your function and then create all the points in robstudio using the x,y,z coordinates.0
-
Hi,As stated above, creating the curve in a CAD-program where you can enter explicit mathematical expressions for the curve and then importing that into RS would be the most convenient solution.Alternatively, if you are familiar with .NET development, you can write some code to generate the targets on the function using VSTA that comes with RS.You can also approach this from a lower level, by implementing instructions direcly in the RAPID language of the controller. RAPID is a powerful language which is similar to any procedural programming language. The main difference that it also contains motion instructions. The language is flexible and allows you to implement you own move instructions using the exisiting ones as building blocks. Example: ArcSine ..., ArcCos,...The last option is hard work! Just enter the coordinates and create the targets where you want them.Henrik Berlin
ABB0 -
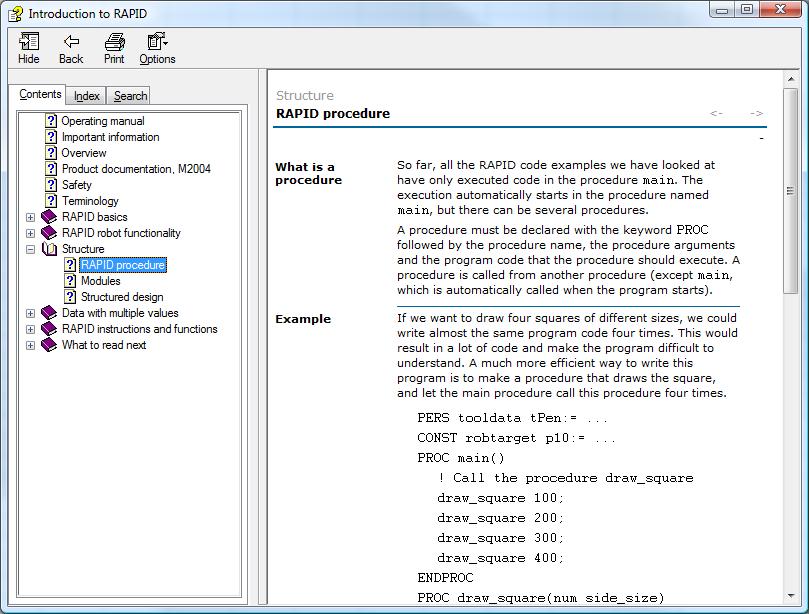
There is a good example ("draw_square") in the manual "Introduction to RAPID", see below:
 Please also check my example code for a IRB140 below :MODULE Module1
Please also check my example code for a IRB140 below :MODULE Module1
CONST robtarget pHome:=[[506.291651245987,1.29490239543512E-12,679.5],[0.499999999999998,0,0.866025403784439,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
CONST robtarget pCenter:=[[554.479956268792,1.73273580794849E-12,533.699988807741],[4.22133561439608E-09,0,1,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
CONST robtarget pStart:=[[554.479955451763,-200.00000706809,533.699989666025],[1.44838108079029E-08,7.56676097447419E-17,1,-5.22428873538805E-09],[-1,0,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
PROC Path_10()
MoveJ pHome,v1000,z100,tool0WObj:=wobj0;
MoveJ pStart,v1000,fine,tool0WObj:=wobj0;
MoveSin pStart,v1000,z0,tool0,wb:=wobj0;
ENDPROC!*********************************************************
! Procedure: MoveSin
! Description:
! The robot moves along a sine wave
!
!*********************************************************
PROC MoveSin(
robtarget StPoint,
speeddata sp,
zonedata zn,
PERS tooldata tl
PERS wobjdata wb)VAR robtarget pTmp;
CONST num n:=100; !steps
CONST num h:=360/n;
VAR num offset_x:=0;
VAR num offset_y:=0;
CONST num amplitude := 100; !mm
CONST num wavelength := 400; !mm
ConfL Off;
FOR i FROM 0 TO n DO
offset_x := amplitude * Sin(i * h);
offset_y := wavelength * i / n;
pTmp:=Offs(StPoint,offset_x,offset_y,0);
MoveL pTmp,sp,zn,tl,Wobj:=wb;
ENDFOR
ENDPROC
PROC main()
Path_10;
ENDPROCENDMODULEIf want to use this instruction from RS you can add it using the "Instruction Template Manager"Henrik Berlin
ABB0 -
I couldn't resist...(You may need to install the XVID codec to view the recording, see http://www.xvidmovies.com/codec/)Henrik Berlin
ABB0 -
Hi, I've seen the video of the moveSin. I also done it in my robotstudio and its working. But the path line (yellow) does not appear. Can you tell me how can I apear the movement or path like you have done in the video.
Thank You..0 -
Simulation tab -> Simulation Monitor -> Check "TCP Trace" optionKind regards,HenrikHenrik Berlin
ABB0 -
Hi,
Great!It's helpful for me!0 -
To Henrik Berlin...I'm using IRB2400_16. Did you obtain the quadratic motion? I do it but the motion is only move along Y axis direction. So you mean there are no problems with my program? I'll try after this.Hud....P.S. Sorry to reply this message using this forum. Your PM inbox is full.0



Categories
- All Categories
- 5.7K RobotStudio
- 401 UpFeed
- 21 Tutorials
- 16 RobotApps
- 306 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 366 IRC5
- 88 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 857 RAPID Programming
- 42 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings