Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
First Robot Path - Performance issues

JarrahP
✭
in RobotStudio
Hi
I'm a new user to robotstudio. I have created a path and successfully downloaded and ran it on our IRB120 manipulator, but it does not track the path anywhere near as well as i would expect with a 10micron accuracy rating.
The simulation gives the warning "corner path failure", i have tried all the suggestions this warning gives. This includes enabling the /CONC option (what does this do? I cannot find any documentation on this option) and reducing the speed. Nothing improves the performance or removes the warning. I also cannot find out what ipol_prefetch_time does or how to increase it.
Robot studio version is 5.14.03.
Link to robot studio station: https://www.dropbox.com/s/kkpxzn9a8y80e2s/station1.rsstnYoutube Video of robot in operation: 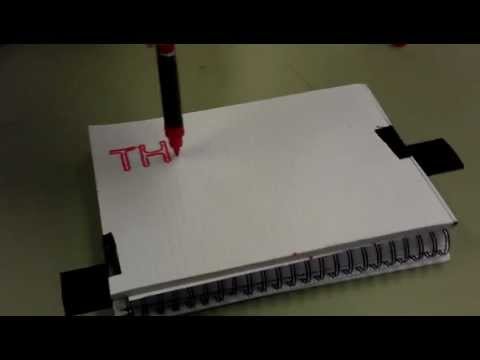 http://www.youtube.com/watch?v=I0zTrkqzwbA
http://www.youtube.com/watch?v=I0zTrkqzwbA
http://www.youtube.com/watch?v=I0zTrkqzwbAAny help would be appreciated
Thankyou
0
Comments
-
You can define the accuracy using zonedata. In your program, it is set to z100 for each point which means that the robot is allowed to deviate from a point with a radius of 100 mm. Try using z0 instead.
You can read more about zonedata in the RAPID Reference Manual that is available in RobotStudio. The pdf version is available here:
http://www.scribd.com/doc/111665895/RAPID-Instructions-Functions-and-Data-types-Technical-reference-manual-ABB-Robotics
Henrik Berlin
ABB0

Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings