Forum Migration Notice
We're transitioning to a more modern community platform by the end of this year. Learn about the upcoming changes and what to expect.
Import Problem - Position out of range

Tobias
✭
in RobotStudio
Dear Community,
when I load a Backup from our booth, everything is operational, except the working range settings. In the booth everything is fine. However the robtargets cannot be used in RobotStudio Simulation. Only jointtargets are working. The error message is like this:
Position out of range. Error 50050
Is there any import problem for a workspace setting or a joint limit setting? I did not find any setting in the user.sys.
Regards
Tobias
0
Comments
-
Hi Tobias,
Please verify that the base frame of the controller and the station coincide. By default, RobotStudio checks this every time the controller is restarted. You can also check manually, see below.

Henrik Berlin
ABB0 -
Hello Henrik,all right. I think this will be the solution. You have helped me a lot this year. It seems like I have to invite you to a beer, next time you are in Berlin.Regards and a happy new yearTobias0
-
Thanks for the invitation, I like beer! I will let you know the next time I visit the city that bears my name.

Merry christmas and happy new year you too!
Henrik Berlin
ABB1 -
Hello,
my problem is very similar to the one described above, so I post here:
I try to use the SAC to control a self-built robot (first of all from solids in the simulation).
It works so far well, I can move the axes individually and the SAC controller is connected to the robot.
Unfortunately, the robot arm moves only when approaching the jointtarget positions when approaching robtarget the Error 50050 appear.
Upper and Lower Joint Bound are chosen big enough. I can reach the Position by Manual moving the axis.
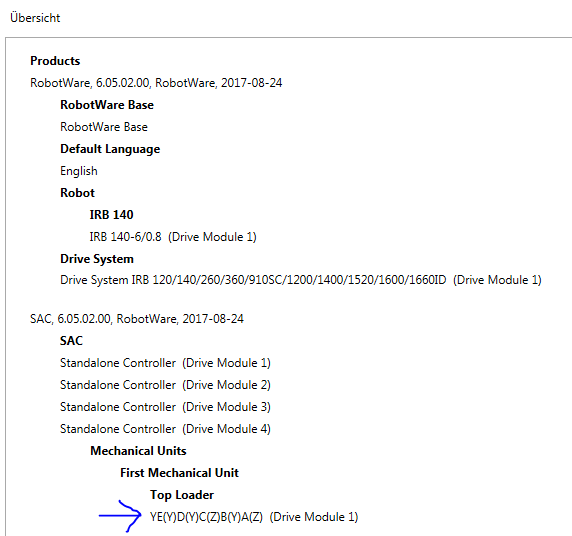
It is a 6 axis robot and I have chosen the following model:
unfortunately I can not see the Pictures Henrik Berlin have posted above...
so how i can Check:" base frame of the controller and the Station coinside" ? - i just found the base Frame on Config-Motion-Robot
Hope for help
")
Sebastian
0 -
Hello, i was able to gain some new knowledge: 1) When i teach the exact same Robot position over the FelxPendant i get this result for the new Target: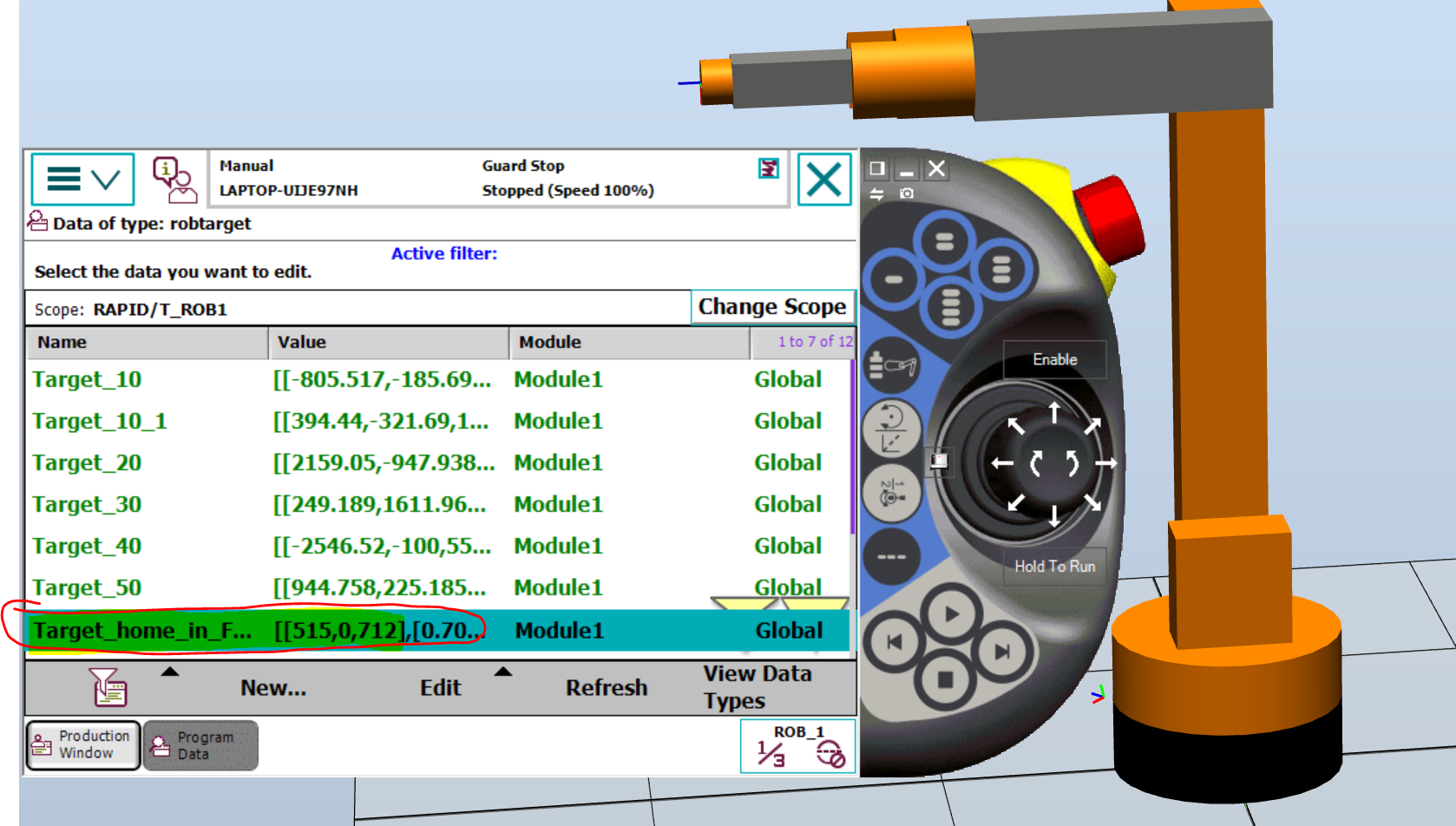 BUT, if I use the "Robot Studio"-User Interface teach option, I get different Target position:
BUT, if I use the "Robot Studio"-User Interface teach option, I get different Target position:
 The Robot is able to move to the Positions of the "Felx_Pedant" positions, but not to the "Robot-Studio" Positions. So there has to be something wrong with thebase frames ...?
Also i am not able to move the Robot linear on "Robot Studio"-User Interface, but i am able make a linear movement on the "Flex Pedant".
I hope you can help me....
The Robot is able to move to the Positions of the "Felx_Pedant" positions, but not to the "Robot-Studio" Positions. So there has to be something wrong with thebase frames ...?
Also i am not able to move the Robot linear on "Robot Studio"-User Interface, but i am able make a linear movement on the "Flex Pedant".
I hope you can help me....
Many thanks in advance Sebastian
0


Categories
- All Categories
- 5.7K RobotStudio
- 401 UpFeed
- 21 Tutorials
- 16 RobotApps
- 306 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 366 IRC5
- 90 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 857 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings