Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Replace one robot in station with more robots?

kuv-vokl
✭✭
in RobotStudio
Hi,
i have a station with some robots.
There are some IRB1600, IRB140, ...
Now, i want to change or replace one of the IRB140 with an IRB120.
I wan t to keep the tools, workobjects and all other data.
What is the shortest and easiest way ?
Thanks to all.
Klaus
Klaus Vogel
Kühne+Vogel Sondermaschinen GmbH
Kühne+Vogel Sondermaschinen GmbH
0
Comments
-
Hi,The easiest way is probably to just load a new system to the station, then transfer the taskdata from the old to the new system. When everything is done, remove the old system. You'll find the function "Move/Copy Task Data" from the task context menu (paths&targets) or the "Modify" tab after selecting a task in the browser.Best regards,
Anders Jahnberg
ABB Robotics0 -
Hi,thanks for this hint.But what is with the linked parts from the station?The parts and the components in the station are depending on the "old" system.Mayby there is a way outside the RS. (e.g. in the file system and XML files)Please check this again. - Thank you.KlausKlaus Vogel
Kühne+Vogel Sondermaschinen GmbH0 -
Hi,I think that would have to be a manual work in the station..An option would maybe be to modify the existing system (change robot type) from System Builder but I would anyway recommend you to add a new one, and then do the required changes to the station logic manually..Best regards,
Anders Jahnberg
ABB Robotics0 -
RobWelding
The Netherlands0 -
Dont know if you need the moc file, because I dont think that changes along.Other than that U can use the following steps per robot:1. add a new robot in your station and place it at teh on you want to replace2. go to the controller tab and click edit system.3. select the folder of the robot you want to change
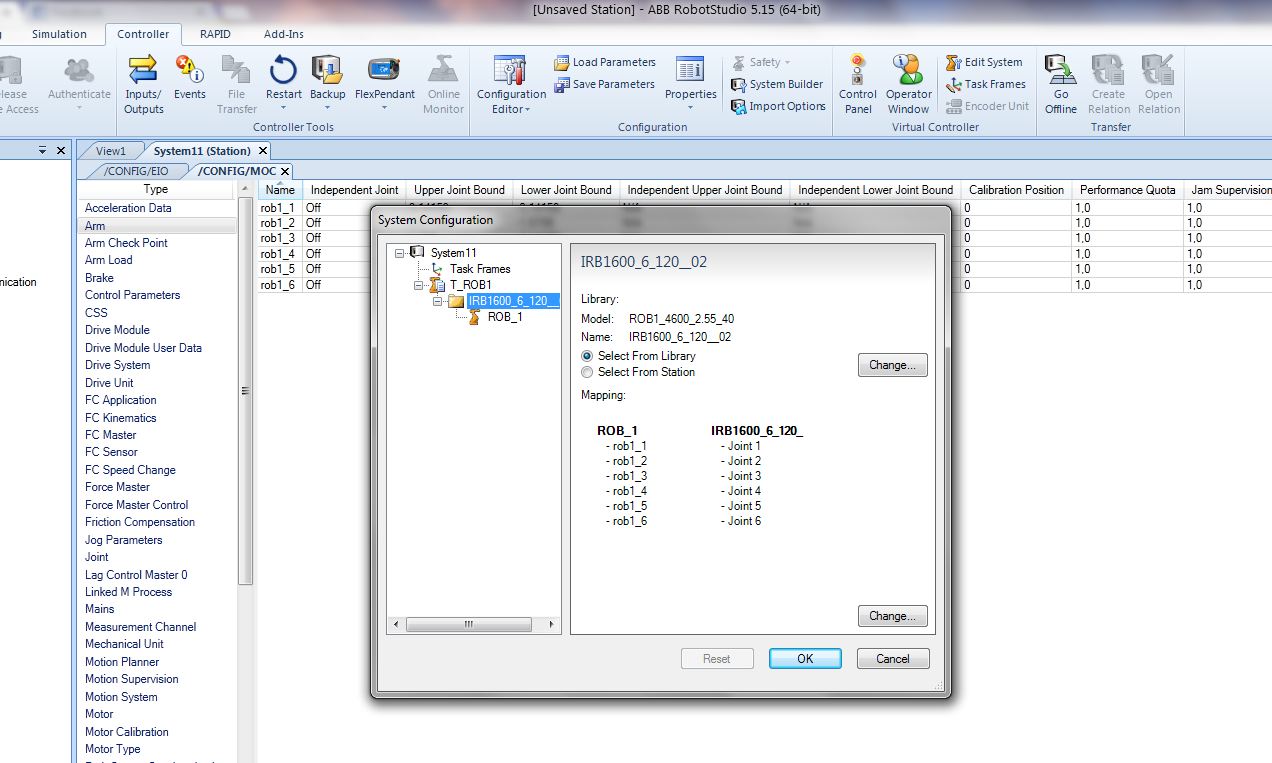 4. choose select from station and click change5. select the robot you want to put in place6. click OK7. see if you want to reposistion all the attached objects.the old robot is automaticaly deleted from your station. Therefore I would recommend to make a pack and go file before executing the steps aboveRobWelding
4. choose select from station and click change5. select the robot you want to put in place6. click OK7. see if you want to reposistion all the attached objects.the old robot is automaticaly deleted from your station. Therefore I would recommend to make a pack and go file before executing the steps aboveRobWelding
The Netherlands0 -
Hi again,The last suggestion from SjoLi is not a good idea
 . In that way you would still keep the configuration for the IRB140 in the controller but use a different robot type in the station...Best regards,
. In that way you would still keep the configuration for the IRB140 in the controller but use a different robot type in the station...Best regards,
Anders Jahnberg
ABB Robotics0 -
Indeed it only works in the station. Not in your VC.As mentioned at the top of my last comment the Motion Config file isn't changed with this method.But if you only need to bring back and forth modules from and to your controller it would work.The targes and paths made in the station are written to your module (VC) as they were in the sttaion. Only load the module to the real controller and not the backup and this could work.RobWelding
The Netherlands0


Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings