Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
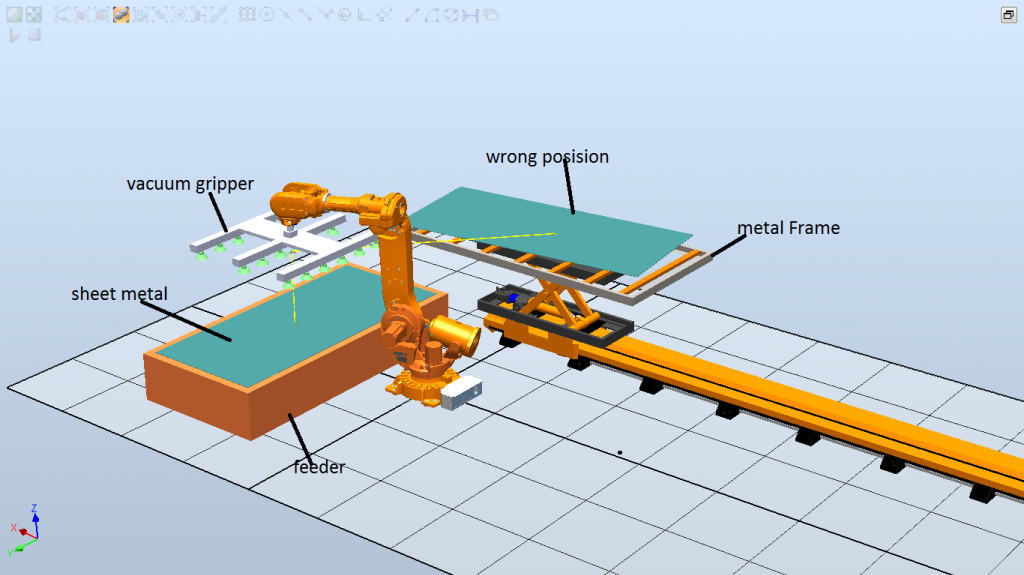
Please help me about "Pick and Leave" sytem

 My pick_leave pack and go file.
My pick_leave pack and go file. Comments
-
It is probably because you are using z100 as your zonedata. You must use fine as zonedata when you go to a point to pick or drop something.
There are two reasons for this
1. The robot position will take shortcuts when you use z100. The robot is considered to be in position when TCP is within a zone of radius 100 mm for z100. In your example, the robot will never reach the leave position, but will continue with next motion instruction as soon as it is 100 mm from it.
2. Another aspect of zone-points is that the program pointer will run ahead and execute any subsequent non-move instructions before the current motion instruction is completed. In your case, it will execute the I/O handshake roughly 100 ms before the robot reaches the point.
Read more about zonedata in the manual RAPID Instructions, Functions and Data types that is available in RobotStudio.
Henrik Berlin
ABB0

Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings