Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
setting up a multirobot station on an IRC5 controller

to the IRC5 controller, so that the simulation and the behaviour in the real world is similar.
In my system i have 3 robots doing a synchronized linear motion.
It's fairly easy to transfer the path information, either by simply copying it unto the controller, use the download function in the system builder or use the transfer function.
But neither of these methods seem to transfer the positions of the robots in my simulation.
And when i monitor the positions of the robots on the real controller, it is obvious that they all have their origin in 0,0,0.
The solution i currently use is to offset all the robot-targets of the three paths, using the PDispSet on the rapid code handed to the controller.
This is a reasonable solution while testing and it works perfectly. But since the goal is that the files has to be auto-generated, and switched about once a day
in a production line, it would be nice if the same file could be used for simulation and actual execution of the robots.
Best Answer
-
If you set up a multimove System in RobotStudio and create the System from Layout, Robotstudio automatically reads the base Frame Position of the robots and stores them in the motion Parameters.
But you should not overwrite the real Motion config with your virtual one, as there are unique Settings like the calibration Offset.
you may look up the values in Controller ribbon -> configuration -> Motion -> Robot -> baseframe x, y, z and orientation in q1 ... q4l
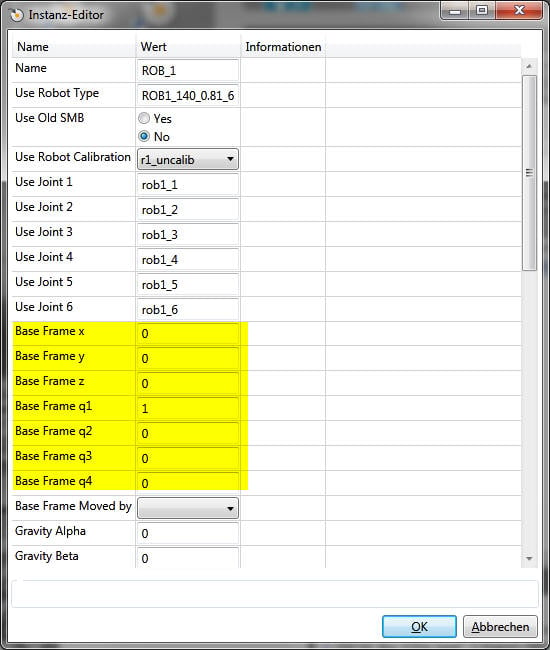
BUT: normally there are some deviation between real and virtual station. Correct way would be to measure the baseframe position of the real robots ->
Use well defined pins as Tools on robot 1 and the to be defined robots. Use Flexpendant ABB -> Calibration -> select Robot -> base Frame...
the result is entered in the Motion Parameters of the real Controller as Robotstudio does with the virtual Controller
regards
regards
Christian5

Answers
-
Thanks this is a much better solution0
-
Hello All. Just one quick comment that makes me suffer till find the error. When usually Robot Studio displays values in mm (millimetres) the inputs above for the base frame are in meters !!! Took me a lot of time to realize that. I hope you don't waste so much time as I did. Cheers.0

Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings