

Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Wobj with custom mechanizm and external axis wizard

Tombie
✭
in RobotStudio
Hello,
I have problem with configuration of robots system with my own created external axis from collada file. I've created mechanism, saved it as a library and imported for my station, move and attached robot to the skid.
After I created robot system from layout , but it was impossible to connect mechanism in this step.
, but it was impossible to connect mechanism in this step.

Added all neccessary options in Installation Menager.


Restart my system and now I have first strange information:
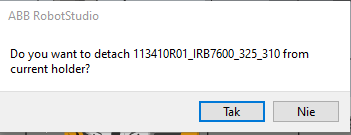
Everytime, when I restart VC RobStudio asks me about detaching robot from track. Why is it asking everytime about it? I want it to be attached - so I press 'No'. Everything is fine at this step so I need to add track as external axis to robot so I use External Axis Wizard.


And now It looks like I want to. I have joint jog active, I my mechanism, as an external axis activated in VC, I can move robot from jog in teachpendant level. Robot wobjt is placed in value 0 of the track and this is what I would like to have.


But now, when I restart my controler one more time, it asks my again about detaching Robot with current holder. When I press 'No' this time, I have information
and from this step wobj is coordinated with the robot base, but I don't want it. Strange is also, that on graphical View of station I can see wobj0 some else from this time, then it real is located. (on the screen USC is set for wobj0 frame which is white shaded on the buttom of the screen)
How to create the system where the wobj0 is located always same place in 0 of track, no-metter what is a possition of the robot on track?
Why every restart programm asks me for deattach robot?
I remember about one year ago, I was creating systems like that in the same way and still have backups for that. Have no idea, why now I cannot reach this
Thank you in advance for help.
I have problem with configuration of robots system with my own created external axis from collada file. I've created mechanism, saved it as a library and imported for my station, move and attached robot to the skid.
After I created robot system from layout
 , but it was impossible to connect mechanism in this step.
, but it was impossible to connect mechanism in this step. Added all neccessary options in Installation Menager.
Restart my system and now I have first strange information:
Everytime, when I restart VC RobStudio asks me about detaching robot from track. Why is it asking everytime about it? I want it to be attached - so I press 'No'. Everything is fine at this step so I need to add track as external axis to robot so I use External Axis Wizard.
And now It looks like I want to. I have joint jog active, I my mechanism, as an external axis activated in VC, I can move robot from jog in teachpendant level. Robot wobjt is placed in value 0 of the track and this is what I would like to have.
But now, when I restart my controler one more time, it asks my again about detaching Robot with current holder. When I press 'No' this time, I have information
and from this step wobj is coordinated with the robot base, but I don't want it. Strange is also, that on graphical View of station I can see wobj0 some else from this time, then it real is located. (on the screen USC is set for wobj0 frame which is white shaded on the buttom of the screen)
How to create the system where the wobj0 is located always same place in 0 of track, no-metter what is a possition of the robot on track?
Why every restart programm asks me for deattach robot?
I remember about one year ago, I was creating systems like that in the same way and still have backups for that. Have no idea, why now I cannot reach this
Thank you in advance for help.
0
Comments
-
Hello there!
Take a look at this post: https://forums.robotstudio.com/discussion/12170/how-to-create-a-mechanism-for-the-standalone-controller-and-xyz-gantry-in-robotstudio
I know it's not a 100% match to your use case, but I cover some mechanism creation pre-requisites in the video which might prove useful for you still.
If it doesn't help, could you upload a P&G of your station so I can have a go at it?—Maxim RiabichevPC Software Support Engineer0 -
Hey,
Thanks for reply, but still I cannot reach situation, that wobj stays in one place. Here in attachment you can find P&G in zip file. In station there is mechanism library and robot. I've created simple controller and programm asked me about detaching.
How to attach robot right now and make wobj of controller with constant position?
Thank for interesting!0 -
Okay, I'll take a look and get back to you.
Hopefully by the end of this week.
(I am willing to do this because it seems like you spent a good amount of time creating a thorough post describing your issue.)Post edited by Maxim Riabichev on—Maxim RiabichevPC Software Support Engineer0 -
Hello there.
I've attached a station with a track that I made based on your mechanism. Your mechanism had a couple of issues.
Can you try this station and let me know if it has solved all the issues you had?
If it has then I'll make a video covering a general workflow that I use to create custom tracks.
Just change the .txt to .rspag and open it in RobotStudio.
—Maxim RiabichevPC Software Support Engineer0 -
Hey,
in your cell it looks fine. I know it took me a lot of time to check it, but we got back to this problem right now. Do you remember how do you created this mechanizm? Did you do some videos maybe?
Thanks a lot0 -
Hello,
My last post in this thread was 9 months ago..")
My biggest advice would be to create the custom track based on an existing track from the library. That is, make sure that its frames are oriented the same way and that its movement is the same.
I talk about these requirements in this video: https://youtu.be/M9Vhuav2FJs —Maxim RiabichevPC Software Support Engineer0
https://youtu.be/M9Vhuav2FJs —Maxim RiabichevPC Software Support Engineer0 -
Hey,
Thanks! This video helped me a bit with mechanizm creation. I also got to know how to create my mechnizm! Finally. But I still cannot understand, why when I move a robot on layout I cannot move also task frame and synchronize it. I need to have all task frames according to wobj placed in world 0. When controller is starting I cannont coordinate task frame with robot base - when I do that points are unreachable. But finally I can work with my mechanizm 0 -
I will see if someone from our team can make a video covering the frames in RobotStudio.—Maxim RiabichevPC Software Support Engineer0
-
Hello again,
My colleague made this video on the topic of Frames in RobotStudio: https://www.youtube.com/watch?v=kTQs1PRIVy8
https://www.youtube.com/watch?v=kTQs1PRIVy8
Please note that it's a bad idea to work in wobj0 as it cannot be moved away from the Task Frame. Always create a new work object and place your targets there instead.—Maxim RiabichevPC Software Support Engineer1 -
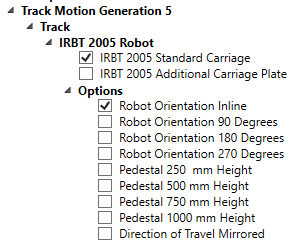
I'm not a track expert but can you really use a IRBT2005 for such a large robot as IRB7600? It's the smallest track in the product range.-----------------
David
Swedish freelance ABB robot programmer0 -
No. IRBT2005 is not valid for IRB7600, because it is designed for small manipulators such as IRB2400, 2600.
0


Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings