
Forum Migration Notice
Update (2026-01-21): The user forums are now in read-only mode pending the data migration.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
Update (2026-01-12): The user forums will be put into read-only mode on the 21st of January, 00:00 CET, to prepare for the data migration.
We're transitioning to a more modern community platform by beginning of next year. Learn about the upcoming changes and what to expect.
How to create a mechanism for a gripper

Maxim Riabichev
admin
in RobotStudio
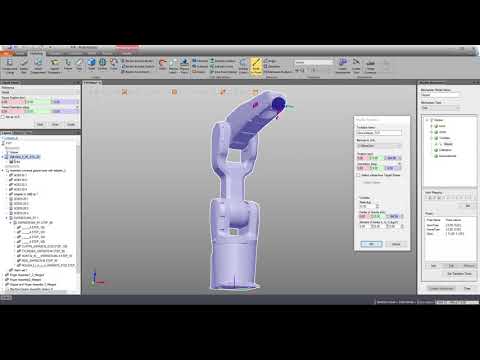
In this video, I show how to create a mechanism for a gripper that is offset from the robot mounting plate. It was originally posted as a response to this thread: https://forums.robotstudio.com/discussion/12528/attaching-tool-to-an-adapter
 https://www.youtube.com/watch?v=yhX9iCWE0To
https://www.youtube.com/watch?v=yhX9iCWE0To
Reviewing the video I see that I've made a mistake (said something wrong) regarding why the tool was up in the air. It is not because of the Tooldata values, it's because of where it is placed when the mechanism was compiled.
Throughout the video, I make more mistakes and I show how to correct them. Perhaps this can be useful for those who end up making the same mistakes.
Please note that this video was recorded in one take, without a script, so it's a little rough.")
https://www.youtube.com/watch?v=yhX9iCWE0ToReviewing the video I see that I've made a mistake (said something wrong) regarding why the tool was up in the air. It is not because of the Tooldata values, it's because of where it is placed when the mechanism was compiled.
Throughout the video, I make more mistakes and I show how to correct them. Perhaps this can be useful for those who end up making the same mistakes.
Please note that this video was recorded in one take, without a script, so it's a little rough.
—
Maxim Riabichev
PC Software Support Engineer
0
Categories
- All Categories
- 5.7K RobotStudio
- 402 UpFeed
- 21 Tutorials
- 16 RobotApps
- 307 PowerPacs
- 407 RobotStudio S4
- 1.8K Developer Tools
- 251 ScreenMaker
- 2.9K Robot Controller
- 368 IRC5
- 92 OmniCore
- 8 RCS (Realistic Controller Simulation)
- 859 RAPID Programming
- 43 AppStudio
- 4 RobotStudio AR Viewer
- 19 Wizard Easy Programming
- 111 Collaborative Robots
- 5 Job listings